Motor
PULSAR HRI motors are PMSM electric machines. The Outrunner configuration is usually more effective in transforming electric energy into high-torque motion, but we always explore other topologies before committing to a particular layout.
The fundamental design factor of our motors resides in the usability. We provide high torque, but we want you to be able to use it realistically on your application. Hence the design requirement of having the peak torque available for the 25% of the DC, without thermal limitations hindering the motor operation.
Efficiency maps at stationary state are usually provided as a tool for motor selection. We do that as well, but what happens on dynamic scenarios where the motor is constantly changing speed and load? Is the efficiency going to be the same? We called that Dynamic Efficiency, and can be virtually assessed on our Digital Twin.
")
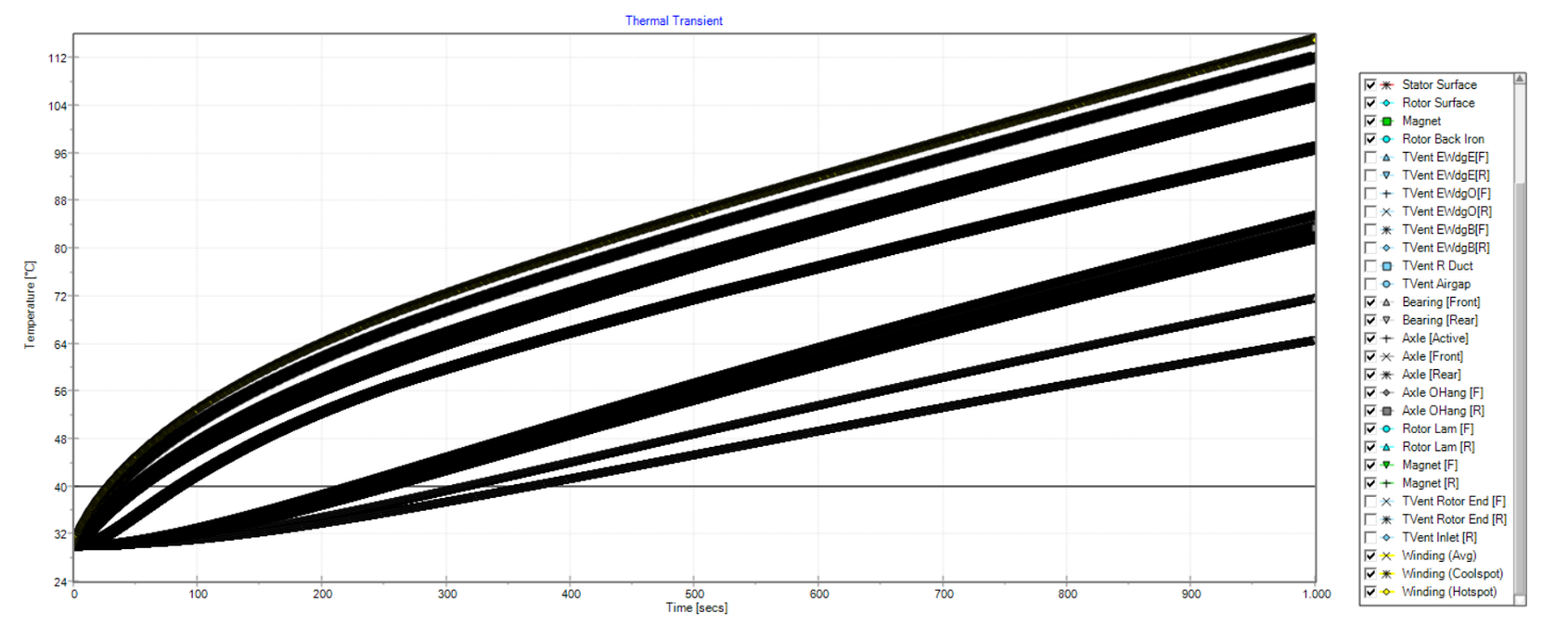
We use several simulation tools and our Digital Twin to model highly dynamic operation and predict the behaviour of our motors under any scenario. Our digital twin allows us to simulate any torque profile, providing the actual performance of our motors with <2% error. This is great information for you as user, and even greater for us as designers. It allows us to create the absolute best motor for your application.
Tailor made to your exact needs.
Unlimited.
Once the design tool is ready, we make sure every material, every geometry and every process guarantees the maximum performance of our motors. We ethically source all the materials present on our motors, from the steel to the magnets. We also take huge pride in our contribution to the recyclability of motors, by eliminating any material, coating or process which difficult the end-of-life processing of our motors.
Lean design. Clean product.