Technology
· technology ·Our design principles go beyond torque; they’re built around a holistic understanding of agility, efficiency, and responsiveness. By deeply analyzing how torque density, control bandwidth, and dynamic efficiency relate, PULSAR establishes a performance-first metric system that informs every actuator design. This ensures every product isn’t just powerful, but anticipates real-world robotic demands with human-like responsiveness.
Read more
Design Scope
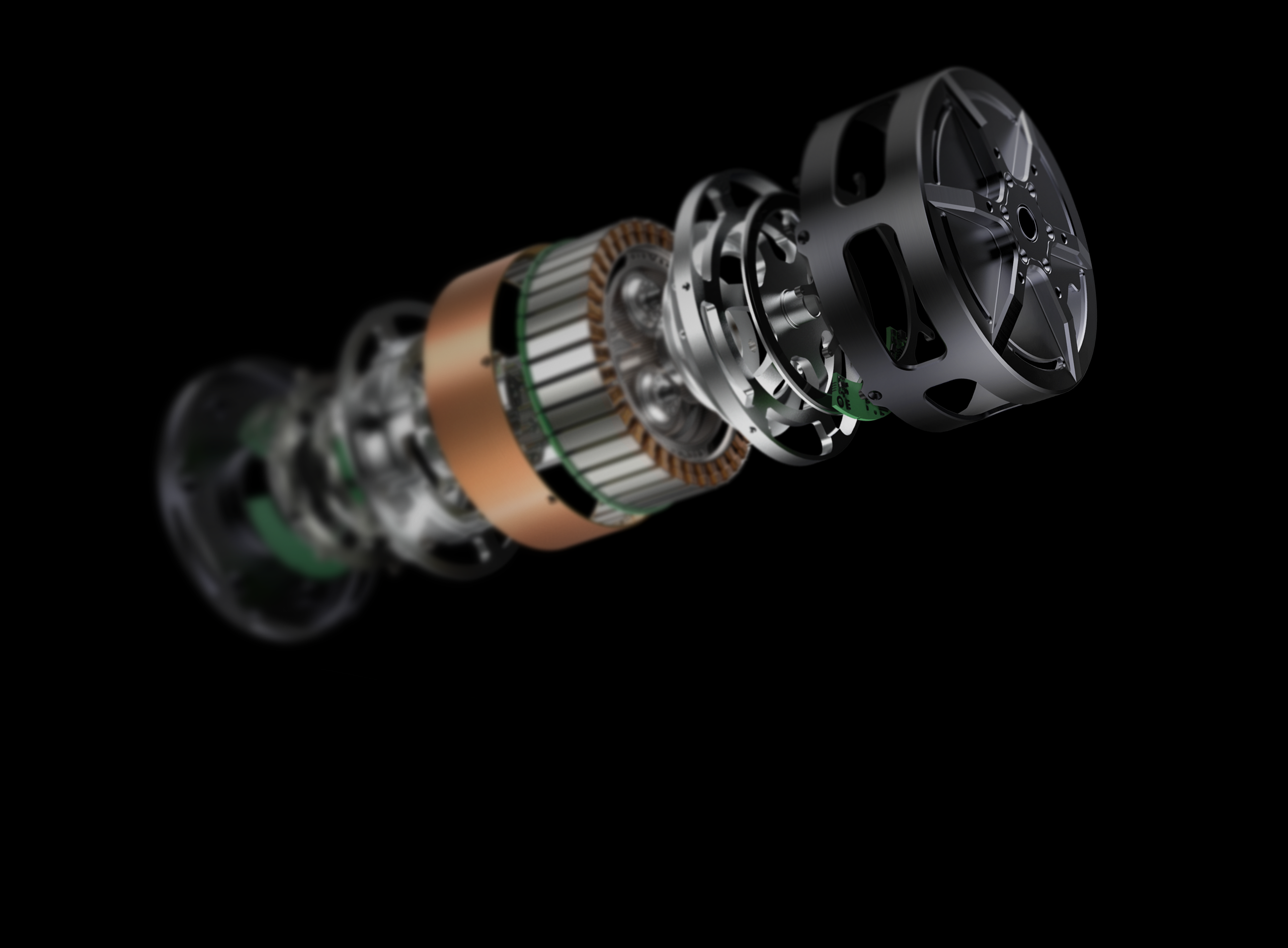
At PULSAR, every actuator is engineered from the ground up. Motor laminations, windings, magnets, mechanical transmission, sensors, power electronics, and control algorithms are all custom-designed in-house. This full-stack integration enables a truly holistic, system-level design approach, optimizing every component for performance, efficiency, and responsiveness. This vertical control extends into manufacturing, ensuring quality, consistency, and design fidelity from simulation to deployment.
Read more
Design Methodology
At the heart of our workflow lies AUGUR®, an advanced digital twin that simulates mechanics, electromagnetics, thermal dynamics, control electronics, and sensors, all validated to within 2% real-world error. This complete virtual replica enables PULSAR to explore thousands of design configurations and pinpoint optimal trade-offs, drastically reducing physical validation requirements and accelerating actuator innovation.
Read more
Motor
PULSAR’s P-motors are purpose-built for high-torque, low-speed applications. Using a PMSM outrunner topology optimized through AUGUR®, each motor is qualified not only by peak torque maps but also by dynamic performance under changing loads. These motors deliver torque for up to a 25% duty cycle with minimal thermal stress and exceptional energy efficiency, making them ideal for battery-limited mobile systems.
Read more
Transmissions
Understanding that transmission quality directly impacts control accuracy, PULSAR uses compact, low-ratio planetary systems engineered for low backlash and minimal inertia. These units preserve the QDD advantage of bandwidth and backdrivability while improving torque capacity, without added bulk, latency, or loss of precision.
Read more
Proprioception
Robots need to feel what they do, and PULSAR delivers. Every actuator integrates dual high-resolution encoders and proprietary torque sensing to provide real-time feedback on torque, position, and velocity. This level of visibility enables force control, safety, and compliance rarely found in compact robotic systems. Combined with the digital twin, these sensors feed accurate models and adaptive control for smoother, safer robot-human interactions.
Read more
Why Quasi Direct Drives?
Quasi-Direct Drive (QQD) actuators offer a well-balanced alternative to traditional high-gear solutions, and a more effective solution compared to direct drive.
Read more
Our Digital Twin Ecosystem
AUGUR is a digital twin ecosystem that mirrors real actuator physics in simulation, enabling unprecedented sim-to-real accuracy.
Read more